临近空间浮空器为巨型柔性结构和多执行器配置,从地面起飞到平流层高度,经历复杂的风场、温度场和压力场变化,由于巨大体积和轻于空气,浮空器易受环境影响产生结构变形和振动;结构变形和振动又对浮空器内部热场、外部流场和多执行器操纵产生反馈,形成显著的气-热-弹-伺服多物理场的耦合效应。 现有基于刚性假设建立的动力学模型已经不满足临近空间浮空器的动力学特征,精确的建模和有效的降阶是解决问题的根本途径。
研究方向
支吊架智能巡检系统
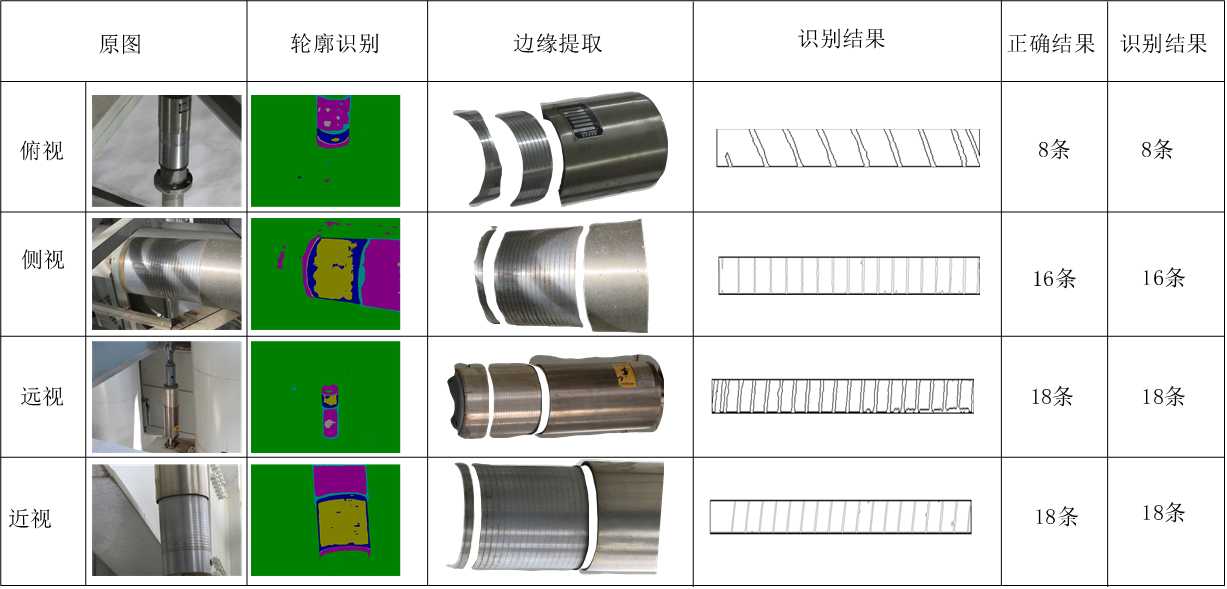
国产支吊架缺陷智能识别系统通过接受现场拍摄的照片,同步识别支吊架类型、支吊架主要部件以及对应的缺陷,以及刻度,仪表显示情况,并将结果反馈到巡检终端。
基于深度学习的移动机械臂视觉抓取
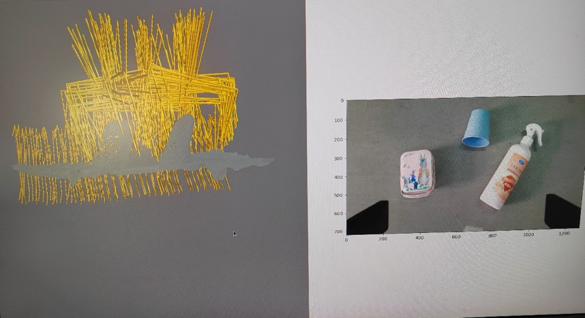
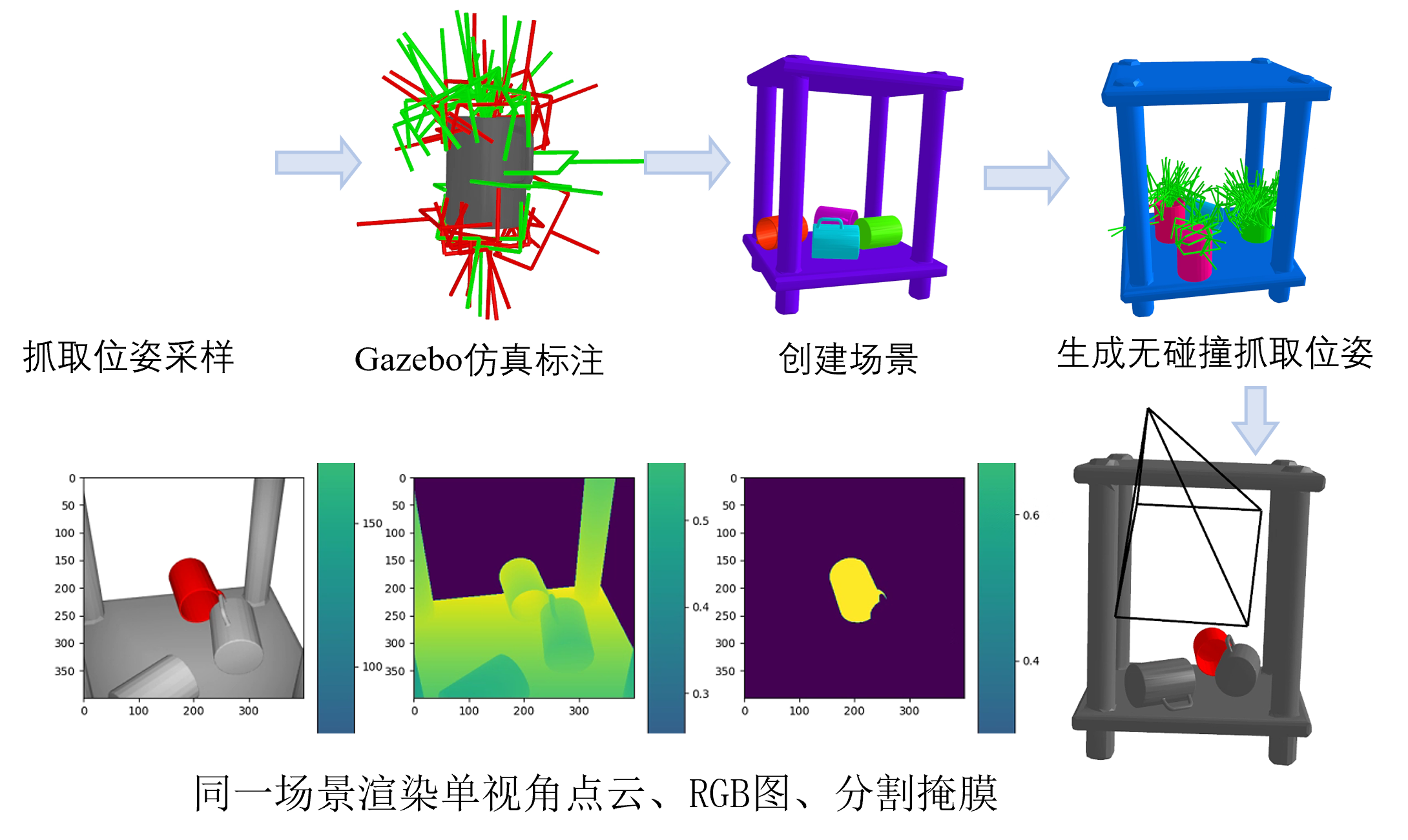
虚拟环境下训练集制作、目标点云分割和深度点云匹配、抓取位姿网络训练、抓取稳定性判断,并实现视觉抓取。
基于几何算法的移动机器人避障
提出了移动机器人在未知环境下实时避障的几何规划方法。该方法将障碍物建模为有向闭环矩形,并建立障碍物的相对方位kd树以快速查找避障所需障碍物, 设计了避障速度与目标速度矢量合成得到指令跟踪速度算法。几何方法机理明确,路径可重复,避障安全性高。
基于SLAM的移动机器人避障
基于复合探索点的主动SLAM建图方法,基于平面分割和矢量合成法,对探索轨迹施加牵引, 减少随机探索带来的地图不确定性;并改进边界点评价函数,考虑到边界长度的增益,提高探索效率。 算法具备探索的趋向性,是对栅格地图深度优先搜索,并考虑目标点对其路径存在牵引作用,避免了机器人轨迹多次覆盖和陷入回路的情况。
基于aruco码的移动机械臂抓取
基于ArUco码实现了目标物的识别与定位;分析夹爪跟踪速度与目标速度之间的关系,根据速度误差提出了移动目标跟踪策略; 利用粒子滤波算法结合ArUco码观测信息实现了移动目标的运动状态估计。通过仿真验证了算法的有效性。
移动机械臂低自由度视觉搜寻与抵近
基于SFM算法,通过多张图片建立了物体的三维模型,并根据点云模型建立了目标坐标系,为目标抓取奠定了基础; 然后,研究了机械臂不同关节组合的视野空间形状和大小, 通过机械臂的两个关节和小车实现了目标搜索与目标抵近,使机械臂运动到目标附近; 最后,基于图像的视觉伺服,完成目标抓取 基于ArUco码实现了目标物的识别与定位; 分析夹爪跟踪速度与目标速度之间的关系,根据速度误差提出了移动目标跟踪策略;
冗余机械臂的避障规划
采用几何推导法设计了基于末端跟随算法的运动控制策略,避免使用复杂的逆运动学进行求解,实现了机械臂末端的精确位置跟踪,提出了一种基于贝赛尔曲线的避障路径规划策略,以碰撞条件和关节角度极值为约束, 以控制点位置为优化变量,通过粒子群优化算法调整贝塞尔曲线控制点得到可行的避障路径。
移动机械臂避障
基于自运动的避障运动学算法与改进RRT算法结合,在实际Kinova Gen3型七自由度冗余机械臂上进行实验。 改进方法获得的路径更加光滑,并能显著提高算法收敛速度与避障效率。
蛇形机器人运动控制
仿生蛇形机器人,为了适应不同的环境,实现蛇的多种运动形式。